问题背景
在现代工业 4.0 和自动驾驶场景中,系统往往表现出离散决策与物理连续执行的深度融合。例如,自动驾驶汽车在感知到障碍物后做出“变道”的离散指令,随后转向执行机构根据指令完成复杂的连续横向动力学控制。
混合自动化(Hybrid Automation)旨在通过统一的数学框架——混合自动机(Hybrid Automata),同时描述离散状态机的转移逻辑和每个状态下的微分动力学行为,从而实现全生命周期的协同建模与仿真。
核心理论
1. 混合自动机关联模型
混合自动机 $H$ 可以由一个六元组定义:$H = (Q, X, Init, f, Dom, E)$,其中:
- $Q$ 是离散状态的集合(如:加速、减速、巡航)。
- $X$ 是连续状态变量的空间(如:速度、位置)。
- $f$ 为定义在每个状态下的微分方程 $\dot{x} = f(q, x)$。
- $Dom(q)$ 是系统被允许留在状态 $q$ 的域(不满足则必须发生跳转)。
- $E$ 是边集,定义了状态跳转的触发条件(Guard)及重置函数(Reset)。
2. 离散-连续接口处理 (Zeno 现象)
协同建模中的一个重要挑战是 Zeno 现象:系统在有限时间内发生了无限次离散跳转。这会导致数字仿真陷入死循环或因步长极小而崩溃。为了处理此类问题,需要引入时间规整或松弛技术: $$ \tau_{wait} = \max(\epsilon, \text{guard_distance}(x)) $$
3. 基于模型的协同设计 (Co-Design)
在传统设计中,算法逻辑(代码)与物理载体(硬件)通常是分开设计的。协同建模允许在软件在环 (SiL) 和硬件在环 (HiL) 阶段使用同步仿真:
- 离散层:使用 Petri 网或 Stateflow 建模任务流。
- 连续层:使用 Modelica 或 Simulink 建模受控对象。
- 关联层:通过 FMI (Functional Mock-up Interface) 协议实现跨平台数据的实时交换。
图示
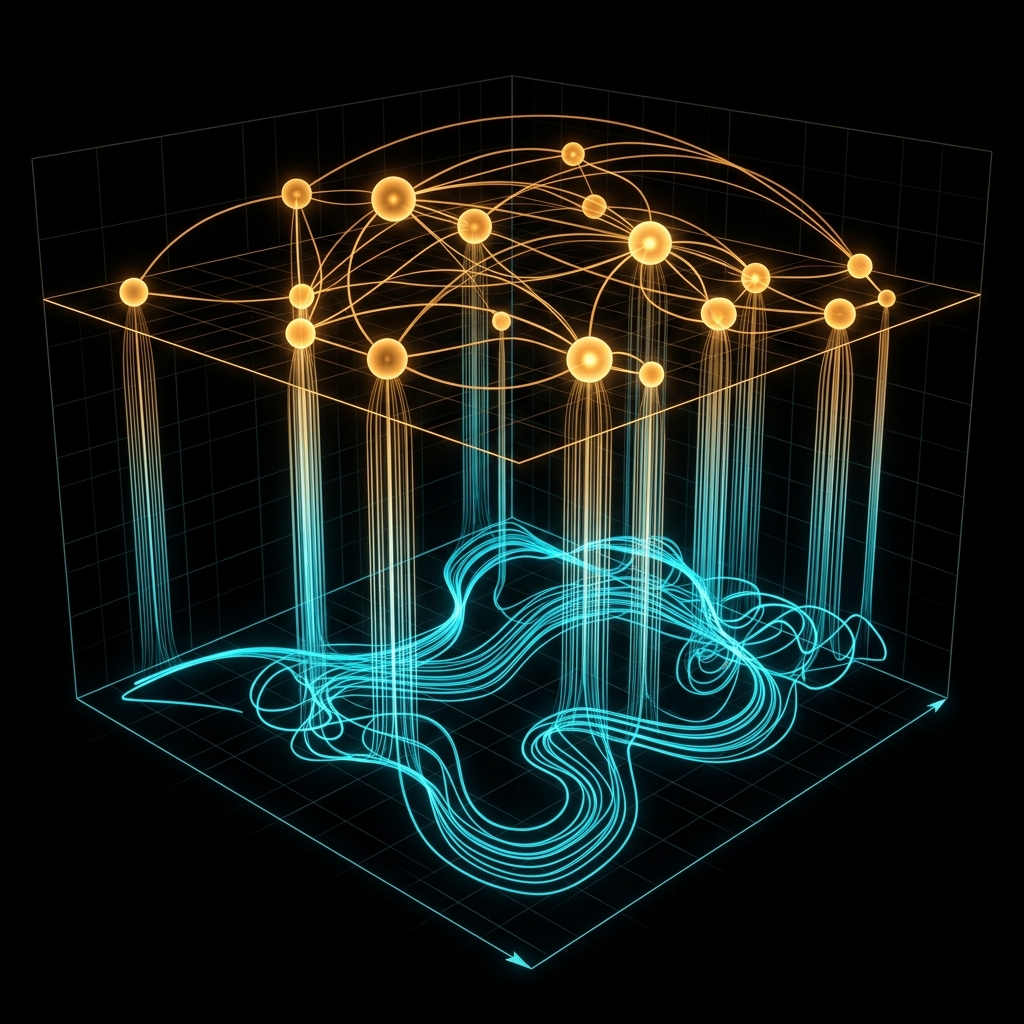
图 1:混合自动化系统分层架构示意图。上层展示了离散状态转换图(状态机逻辑),下层展示了对应状态下的动力学轨迹,中间的双向箭头展示了 Guard 触发条件与 Reset 重置函数的数据流向。
研究前沿与挑战
- 大规模混合系统的安全性分析:如何对具有上千个离散状态和高维连续状态的自动机进行符号化验证(Reachability Analysis)。
- 人工智能与混合架构集成:当离散决策逻辑由深度神经网络(而非人工规则)生成时,其混合稳定性证明目前仍是学科难题。
- 数字孪生同步:如何实时调整混合自动机的数学模型参数,使其能够动态逼真地反映物理车间的实际状态。
参考延伸
- Alur, R. et al. (1995). The algorithmic analysis of hybrid systems.
- Henzinger, T. A. (1996). The theory of hybrid automata.
- Platzer, A. (2010). Logical Analysis of Hybrid Systems.
- Scholte, J. et al. (2020). Modeling and analysis of industrial cyber-physical systems. drug-delivery systems and economic models.