问题背景
在许多物理系统中,控制作用并非持续施加,而是在某些离散时间点以脉冲的形式瞬间作用。例如,卫星的姿态调整推力器喷射、神经网络的脉冲刺激(Spiking)、以及具有固定采样频率的工业控制网络。
脉冲控制(Impulsive Control)研究如何通过有限次、非连续的干扰,使一个原本发散或不稳定的连续系统达到某种期望的平衡态。这种方式相比持续控制,具有更低的能耗和通信带宽需求。
核心理论
1. 脉冲系统的状态方程
一个典型的脉冲受控系统可描述为: $$ \begin{cases} \dot{x}(t) = f(t, x(t)), & t \neq t_k \ \Delta x(t) = I_k(t, x(t)), & t = t_k \ x(t_0^+) = x_0 \end{cases} $$ 其中,$\Delta x(t_k) = x(t_k^+) - x(t_k^-)$ 是状态在脉冲时刻 $t_k$ 的跳变。如果 $I_k$ 能够抵消系统的发散趋势,即使 $\dot{x} = f(x)$ 是不稳定的,整体系统依然可以稳定。
2. 离散调度问题 (Non-continuous Scheduling)
在多任务并发的嵌入式系统中,CPU 资源需要在不同控制回路间离散分配。这涉及如何安排脉冲观测与控制指令的施加时刻 $t_k$,以保证整体实时性。
调度逻辑通常遵循: $$ t_{k+1} = t_k + h_k(\text{error}, \text{resource}) $$ 当误差超出阈值(事件触发)或者达到固定周期(时间触发)时,系统才执行一次控制动作。
3. 混合 Lyapunov 泛函
对于含有脉冲的系统,寻找一个在连续段 $t \in (t_k, t_{k+1})$ 递增但在脉冲时刻 $t_k$ 大幅下降的函数 $V(t)$: $$ V(t_k^+) \leq \rho V(t_k^-), \quad 0 < \rho < 1 $$ $$ \dot{V}(t) \leq \lambda V(t), \quad \lambda > 0 $$ 系统的整体稳定性取决于脉冲间隔 $\delta = t_{k+1} - t_k$。为了保证收敛,脉冲间隔必须满足: $$ \ln \rho + \lambda \delta < 0 $$ 即脉冲带来的“降能”速度必须快于连续段能量增长的速度。
图示
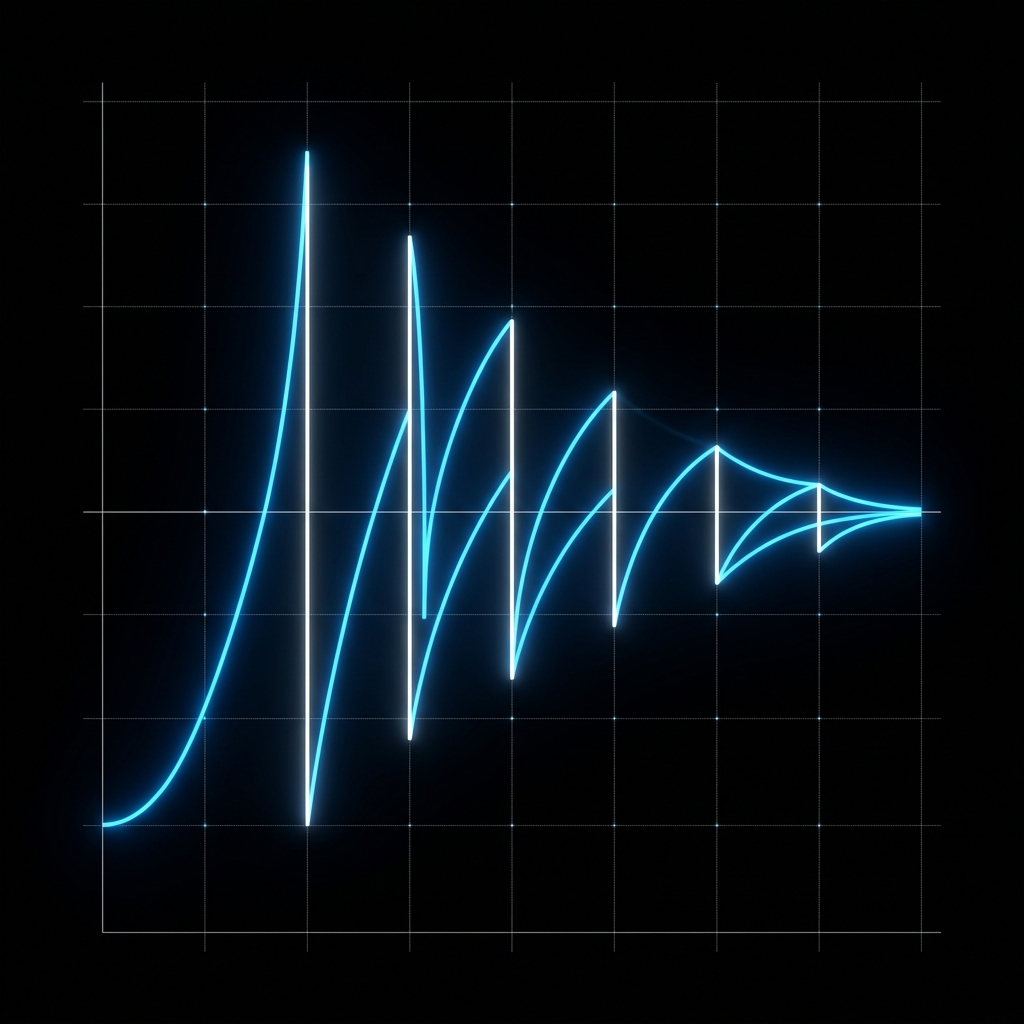
图 1:脉冲控制信号与系统状态轨迹的叠加图。垂直脉冲代表控制作用时刻的状态瞬时跳变,折线展示了在离散干预下系统如何从发散趋势被“拉回”到稳定边界。
研究前沿与挑战
- 抖振消除 (Chattering Avoidance):在滑动模态脉冲控制中,如何避免脉冲频率过高导致的硬件损伤。
- 随机脉冲时刻:当脉冲发生的时刻受网络延迟或丢包干扰时,如何利用蒙特卡洛方法评估稳定性概率。
- 事件触发机制 (Event-triggered):开发能够在线动态计算控制时刻 $t_k$ 的轻量化算法,以最大程度节省算力资源。
参考延伸
- Lakshmikantham, V. et al. (1989). Theory of Impulsive Differential Equations.
- Yang, T. (2001). Impulsive Control Theory.
- Tabuada, P. (2007). Event-triggered real-time scheduling of control tasks. drug-delivery systems and economic models.