背景
現代の産業 4.0 や自動運転では、離散的な意思決定と連続的な物理実行が高度に統合されています。ハイブリッドオートマトンという数学的枠組みを用いて、状態遷移と動力学挙動を統一的に記述します。
核心理論
1. ハイブリッドオートマトン
離散状態、連続変数、微分方程式、不変条件、ジャンプ条件を統合したモデルです。
2. 協調設計 (Co-Design)
FMI などのプロトコルを用い、異なるシミュレーション環境間でのリアルタイムなデータ交換と協調シミュレーションを実現します。
図示
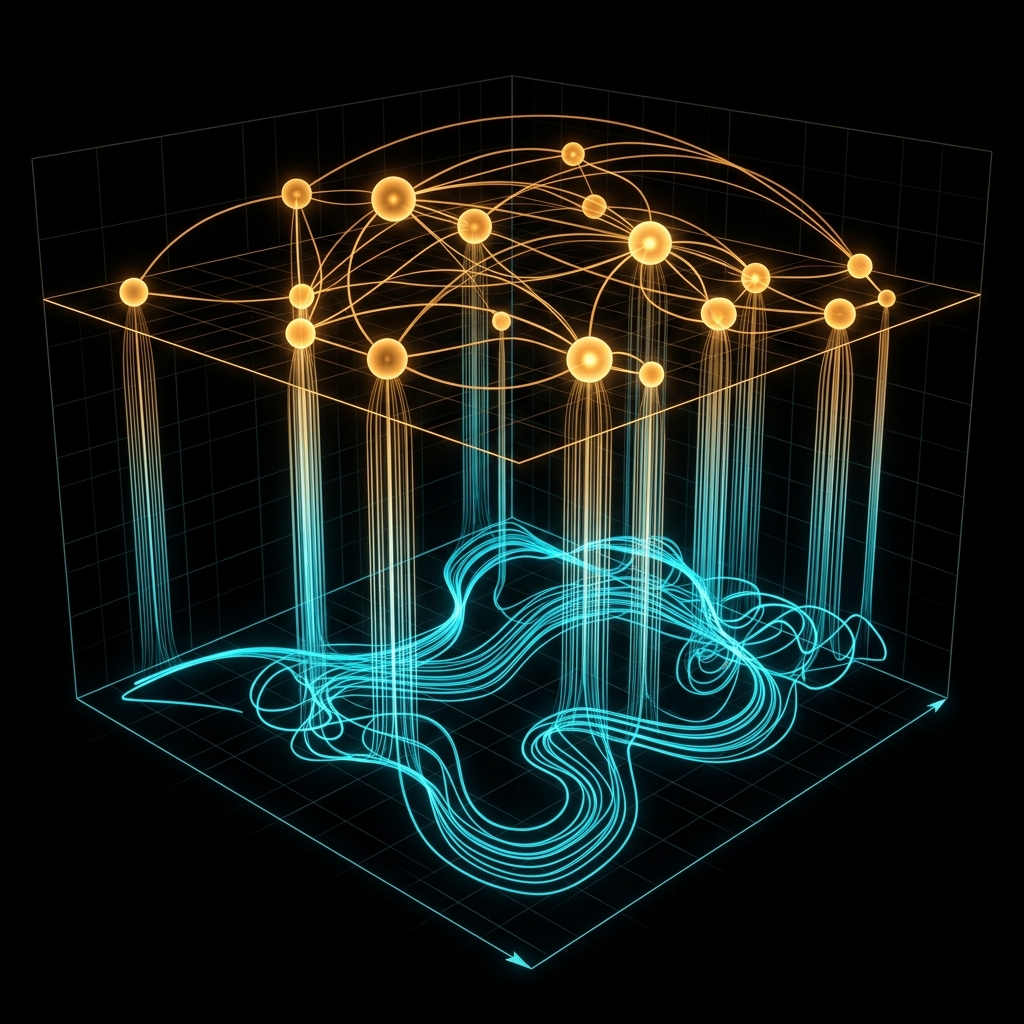 図 1:決定論的状態遷移(離散)と物理軌道(連続)の相互作用を示す階層図。
図 1:決定論的状態遷移(離散)と物理軌道(連続)の相互作用を示す階層図。