Background
Modern automation involves the deep fusion of discrete decision-making and continuous physical execution. Hybrid automation uses the Hybrid Automata framework to simultaneously describe state machine transitions and differential dynamics.
Core Theory
1. Hybrid Automata Model
Defined by $(Q, X, Init, f, Dom, E)$, representing discrete states, continuous variables, continuous flows, invariants (domains), and discrete jumps.
2. Co-Design & FMI
Synchronous simulation bridges discrete layers (e.g., Petri Nets) and continuous layers (e.g., Modelica) using the Functional Mock-up Interface (FMI) for real-time data exchange.
Figure
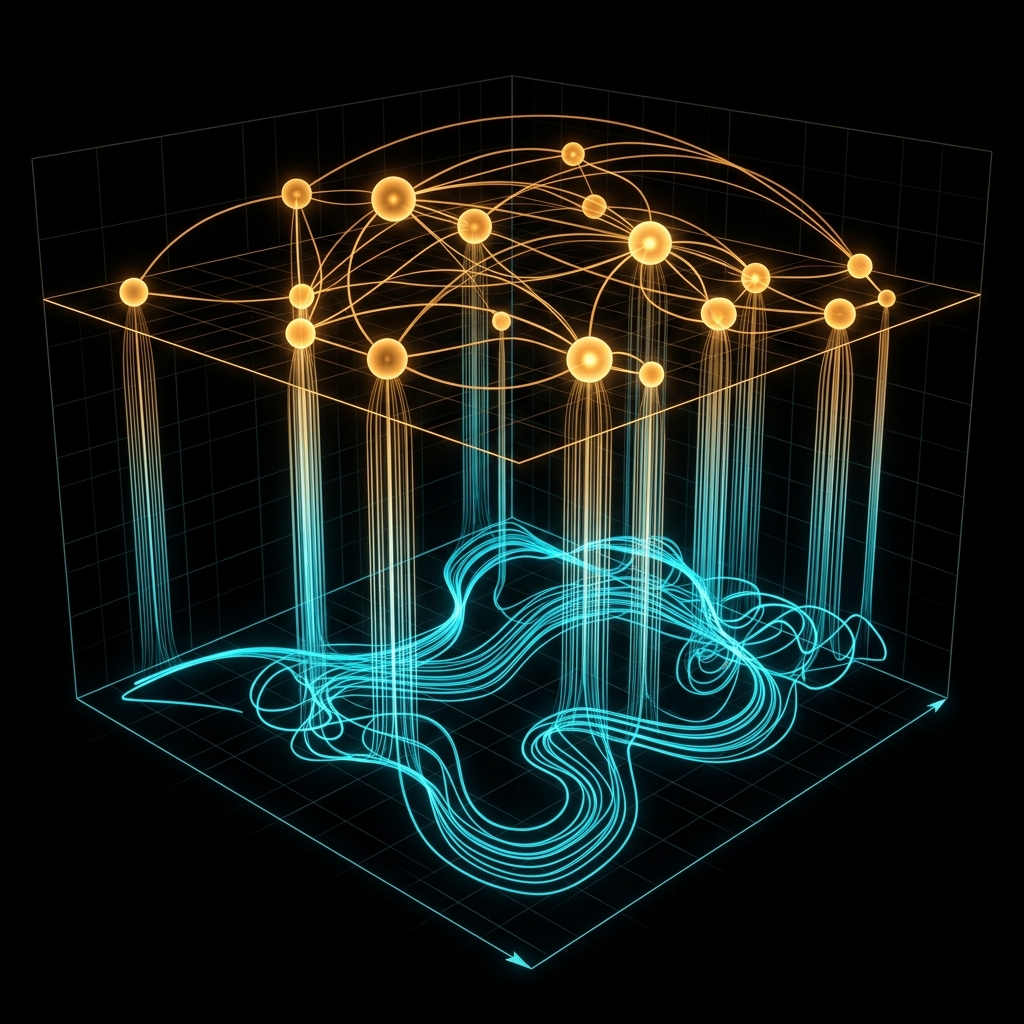 Figure 1: Hierarchical architecture of hybrid automation showing the interaction between finite state machines and dynamic trajectories via guard conditions.
Figure 1: Hierarchical architecture of hybrid automation showing the interaction between finite state machines and dynamic trajectories via guard conditions.