Background
Switching systems consist of a set of continuous-time subsystems and a logic rule governing the switching between them. Integrating multiple stable subsystems may still lead to instability without proper switching signals; conversely, unstable subsystems can be stabilized through specific switching strategies.
Core Theory
1. Mathematical Description
$\dot{x}(t) = A_{\sigma(t)} x(t)$, where $\sigma(t)$ is the switching signal.
2. Common Lyapunov Function (CLF)
A system is asymptotically stable under arbitrary switching if there exists a single positive definite matrix $P$ satisfying $A_i^\top P + P A_i < 0$ for all $i$.
3. Multiple Lyapunov Functions (MLF) & Average Dwell Time (ADT)
Stability can be guaranteed if the average time spent in each mode is long enough to dissipate the energy jump caused by switching: $\tau_a \geq \frac{\ln \mu}{\lambda_0}$.
Figure
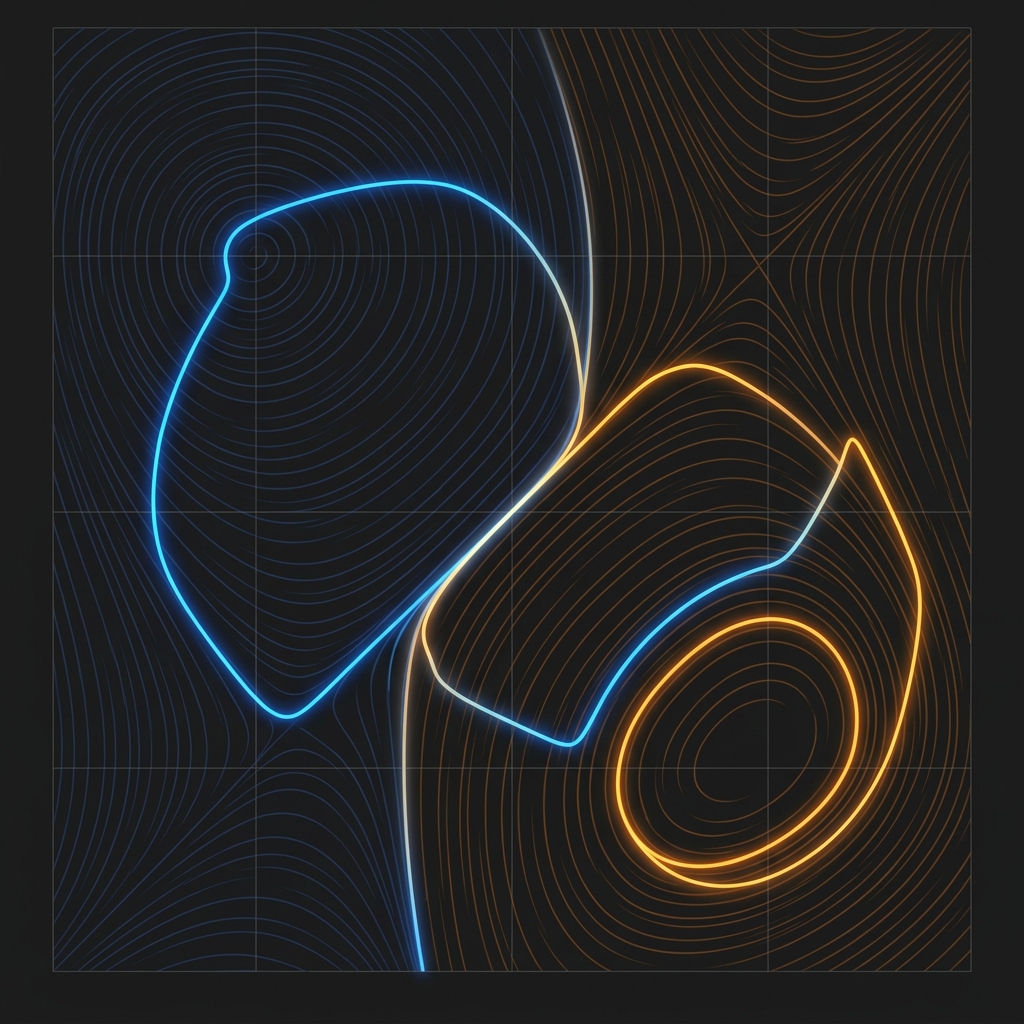 Figure 1: Phase trajectories of two linear subsystems showing the impact of dwell time on overall convergence.
Figure 1: Phase trajectories of two linear subsystems showing the impact of dwell time on overall convergence.